Tecnológico Nacional de México
Tecnológico Nacional de México

Tuxtla Gutiérrez, Chis., 23 de marzo de 2022.TecNM/DCD. El tecnólogo chiapaneco Héctor Daniel Vázquez Delgado, obtuvo el título de Doctor en Ciencias de la Ingeniería en el TecNM Tuxtla Gutiérrez con la presentación de su tesis “Algoritmo de Visión estéreo para la cadencia de video con FPGA”, la cual aprobó de manera satisfactoria.
El ahora doctor en Ciencias desarrolló un algoritmo de coincidencia estéreo integrada en una FPGA (Field Programmable Gate Arrays), en colaboración con el estudiante de maestría, Marco Antonio Palacios Ramos, y su asesor al doctor Madaín Pérez Patricio.
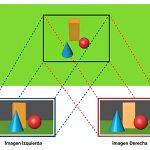
Sobre este importante proyecto, Vázquez Delgado comentó que la visión estéreo se centra en evaluar la profundidad de la ubicación de los objetos en una escena, basándose en dos o más puntos de vista, tal como lo hacen nuestros ojos.
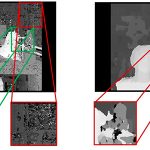
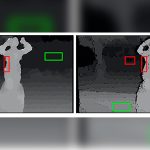
“Los algoritmos procesan dos imágenes en escala de grises rectificadas como entrada y producen un mapa de disparidad. Este algoritmo se ha aplicado en detección de objetos o robots autónomos”, detalló.
Y agregó “en visión estéreo, para tomar decisiones en tiempo real, se requiere un intensivo procesamiento de hardware”.
Así mismo, el tecnólogo destacó que como primer paso se realizó la estimación de mapas de disparidad con diferentes tamaños de ventana, utilizando la suma de diferencias absolutas (SAD) como métrica de correlación local.
En el segundo paso, una vez que se obtienen los mapas de disparidad, se calcula la consistencia izquierda-derecha para cada tamaño de ventana. Posteriormente, en el paso tres, se estima una medida de similitud del píxel central y sus vecinos a través de una ventana de 5 × 5 y se extrae el gradiente de Sobel de la imagen de la izquierda.
Para el cuarto paso, los parámetros son procesados utilizando un sistema de inferencia Difusa (FIS, por sus siglas en inglés), que combina las disparidades calculadas y genera un mapa de disparidad final.
Finalmente, en el paso 5 se establece una arquitectura integrada en FPGA. Los resultados demostraron que esta formulación algorítmica proporciona resultados con mayor similitud al mapa de verdad en comparación con el estado actual de la técnica.
Con este proyecto se puede utilizar para la estimación de profundidades, tal vez en casos más complejos como en cirugías. Ya hay algoritmos que se están implementado de este tipo para navegación autónoma, como son los vehículos no tripulados (drones o vehículos Tesla) que utilizan un campo de visión” compartió Daniel Vázquez.
Por último, el doctor en Ciencias de la Ingeniería remarcó que el dispositivo que utilizó para su proyecto es de bajo costo en comparación a los que se encuentran en el mercado, ya que el FPGA propuesto, vale de 3 mil a 4 mil pesos, mientras que otros dispositivos llegan a costar de 15 mil a medio millón de pesos.


Debe estar conectado para enviar un comentario.